Two Examples to Illustrate the Extent to Which Technical Defects Cause Traffic Accidents
08 Nov 2020Vehicle TechnologyNot every technical defect that is found in conjunction with an accident should necessarily be seen as the cause of the accident. In order to determine whether or not this is the case, the accident needs to be examined in detail by an expert, as illustrated by the two examples below:
Example 1:
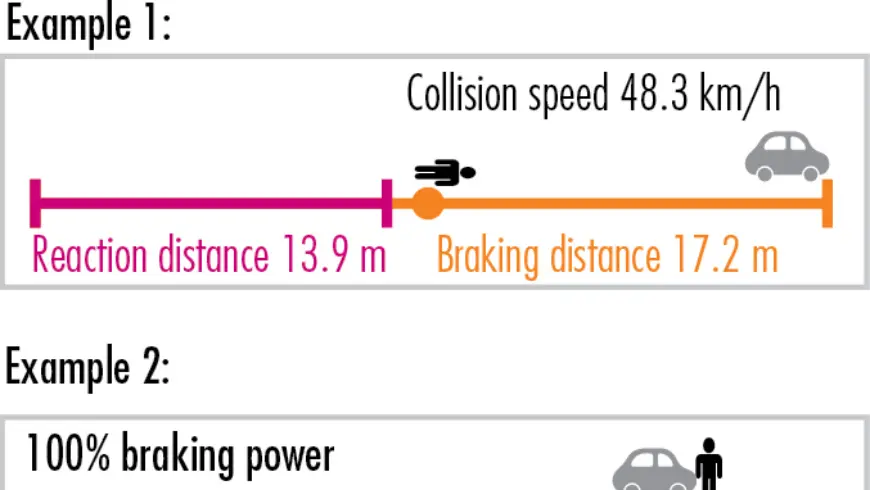
A car is driving through a built-up area at a speed of 50 km/h. The dry asphalt road has two lanes: one in each direction. There are several vehicles driving toward the car on the opposite side of the road, also at 50 km/h. An e-scooter user traveling slowly pulls out from between two parked vehicles into the same lane as the car, 15 meters in front of it. The driver of the car initiates a braking procedure. Shortly after the car begins to brake, it hits the e-scooter user at the height of its right headlamp. The vehicle comes to a stop after a braking distance of 17.2 meters. The e-scooter user is severely injured, or possibly even killed. At the site of the accident, it becomes clear that the two rear brake discs were both partially rusted. If we assume a reaction time of one second – including all system times, such as the brake force build up time – emergency braking at full power would begin after a reaction distance of 13.9 meters if the car was traveling at 50 km/h. Braking begins just before the collision. It does not stop until the car has traveled 16.1 meters (= 13.9 meters + 17.2 meters - 15 meters) beyond the point of the collision. The collision speed is 48.3 km/h. An expert performs a detailed examination of the braking system in a workshop to determine what effect the defect in the braking system has. The expert finds that the rear brakes were barely able to transfer any braking force. As such, the braking system’s performance is only 70 percent of that of a system that has been maintained in optimum working condition. Despite this, the defect in the braking system is not a cause of the accident in example 1. The car would always have hit the e-scooter user at a speed of 50 km/h or just below regardless of the condition of the brakes.
A car is driving through a built-up area at a speed of 50 km/h. The dry asphalt road has two lanes: one in each direction. There are several vehicles driving toward the car on the opposite side of the road, also at 50 km/h. An e-scooter user traveling slowly pulls out from between two parked vehicles into the same lane as the car, 15 meters in front of it. The driver of the car initiates a braking procedure. Shortly after the car begins to brake, it hits the e-scooter user at the height of its right headlamp. The vehicle comes to a stop after a braking distance of 17.2 meters. The e-scooter user is severely injured, or possibly even killed. At the site of the accident, it becomes clear that the two rear brake discs were both partially rusted. If we assume a reaction time of one second – including all system times, such as the brake force build up time – emergency braking at full power would begin after a reaction distance of 13.9 meters if the car was traveling at 50 km/h. Braking begins just before the collision. It does not stop until the car has traveled 16.1 meters (= 13.9 meters + 17.2 meters - 15 meters) beyond the point of the collision. The collision speed is 48.3 km/h. An expert performs a detailed examination of the braking system in a workshop to determine what effect the defect in the braking system has. The expert finds that the rear brakes were barely able to transfer any braking force. As such, the braking system’s performance is only 70 percent of that of a system that has been maintained in optimum working condition. Despite this, the defect in the braking system is not a cause of the accident in example 1. The car would always have hit the e-scooter user at a speed of 50 km/h or just below regardless of the condition of the brakes.
Example 2:
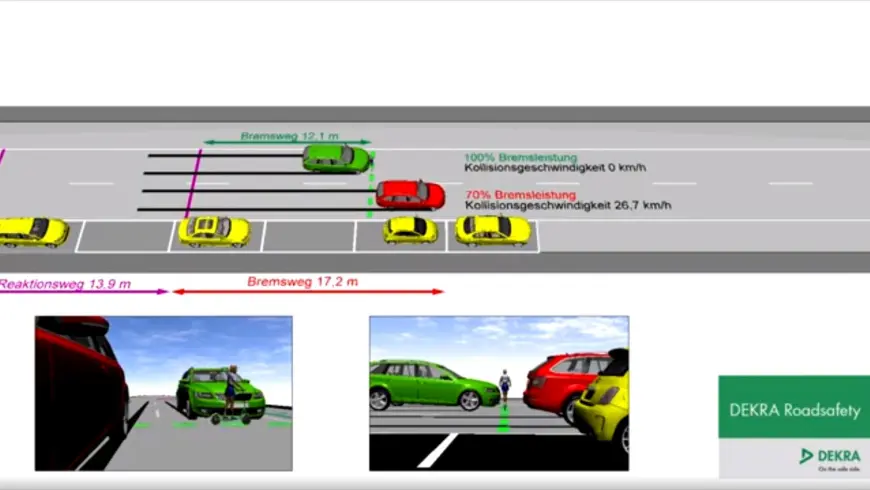
Instead of the 15 meters in the previous example, the e-scooter user now pulls out into the lane at a distance of 26 meters in front of the car. Assuming the same reaction time (one second) and 70 percent of the original braking power, the car collides with the e-scooter user 4.9 meters before it comes to a stop. This corresponds to a residual speed of 26.7 km/h. The e-scooter user will probably be injured. A fully functional braking system would bring the car to a stop after 26 meters (13.9 meters reaction distance + 12.1 meters braking distance). The e-scooter user would not suffer any physical injuries. In this case, the defect in the braking system would be a cause of the accident.
Instead of the 15 meters in the previous example, the e-scooter user now pulls out into the lane at a distance of 26 meters in front of the car. Assuming the same reaction time (one second) and 70 percent of the original braking power, the car collides with the e-scooter user 4.9 meters before it comes to a stop. This corresponds to a residual speed of 26.7 km/h. The e-scooter user will probably be injured. A fully functional braking system would bring the car to a stop after 26 meters (13.9 meters reaction distance + 12.1 meters braking distance). The e-scooter user would not suffer any physical injuries. In this case, the defect in the braking system would be a cause of the accident.
Results:
The accident cannot be reconstructed correctly until the braking deceleration possible with the defect has been calculated. If the defect in the braking system is not detected at all, the speed at which the car was traveling would be calculated as being 59.7 km/h, based on a braking distance of 17.2 meters and a braking deceleration of 8 m/s2, which is the same deceleration rate we assumed earlier. This could result in the cause of the accident being deemed in court to have been “excessive speed” rather than “technical defect.” This makes the technical examination of the vehicles involved an extremely important part of the accident reconstruction process.