Effektive Werkzeuge zur Vermeidung von Verkehrsunfällen
24. Jan. 2019News & AktionenGesetzte Ziele erreicht: Auf diesen Nenner lässt sich das Forschungsprojekt „Ko-HAF – Kooperatives Hochautomatisiertes Fahren“ bringen. Über einen Zeitraum von knapp dreieinhalb Jahren haben 16 Partner aus Industrie, Wissenschaft und öffentlicher Hand – darunter Audi, BMW, Bosch, die Bundesanstalt für Straßenwesen, Continental, Daimler, die Technische Universität München und die Universität Würzburg – zahlreiche Fragen zur Technik und zu Schnittstellen beleuchtet. Das Projekt wurde vom deutschen Bundesministerium für Wirtschaft und Energie im Rahmen des Programms „Neue Fahrzeug- und Systemtechnologien“ mit 16,9 Millionen Euro gefördert.
Hintergrund: Ko-HAF zielt auf das sichere hochautomatisierte Fahren bei höheren Geschwindigkeiten. Solche Systeme muss der Fahrer nicht mehr dauerhaft überwachen. Er kann sich anderen Aufgaben widmen, muss jedoch immer in der Lage sein, die Steuerung nach Aufforderung mit einer gewissen Zeitreserve zu übernehmen. Dazu muss die Vorausschau des Fahrzeugs weiter reichen, als dies mit eigenen Sensoren möglich ist.
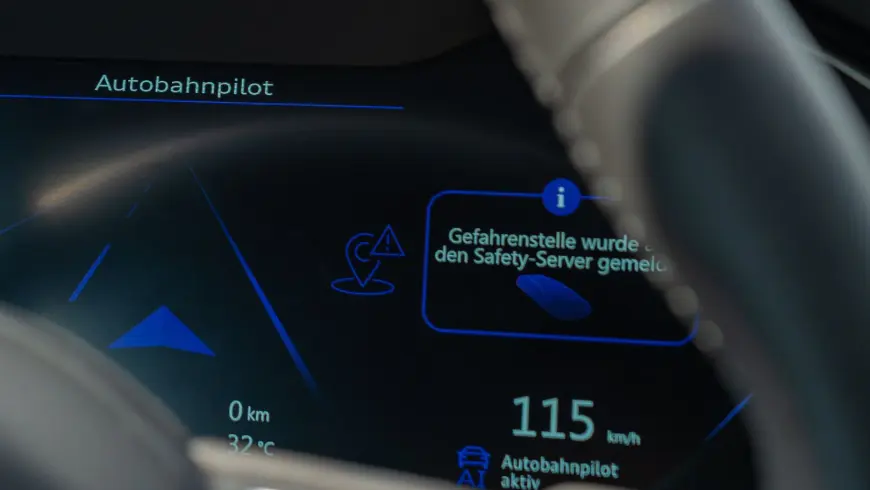
Hier setzt Ko-HAF an: Fahrzeuge senden ihre Umfeldinformationen über Mobilfunk an den sogenannten Safety Server. Dort werden diese gesammelt und verdichtet, sodass den Fahrzeugen eine hochgenaue aktuelle Karte zur Verfügung steht, die im Sinne eines künstlichen Horizonts die benötigte bessere Vorausschau liefert.
Die Projektergebnisse zeigen, dass mittels Kommunikation zwischen Fahrzeugen und Safety Server eine deutlich erweiterte Umfeldwahrnehmung möglich ist. Dies schafft die für hochautomatisiertes Fahren notwendige Vorausschaureichweite. Entwickelt wurden unter anderem auch hochautomatisierte Fahrfunktionen für das Fahren auf der Autobahn wie zum Beispiel Einfädeln, Überholen, Abfahren oder Nothalt.
Darüber hinaus haben zahlreiche Versuche gezeigt, dass während des automatisierten Fahrens Schläfrigkeit und Ermüdung unter Umständen schnell entstehen können und wechselhaften Veränderungen unterliegen. Auch fahrfremde Tätigkeiten während der automatisierten Fahrt standen im Fokus der Versuche. Für geplante Übernahmeaufforderungen wurde gezeigt, dass mehrstufige Mensch-Maschine-Schnittstellen das Beenden von fahrfremden Tätigkeiten und damit die Übernahmezeit beschleunigen.
Fotos: Ko-HAF